中国空间站航天员成功完成了首次出舱任务,这对于我国来说是一件突破性的挑战,2008年神舟七号的出舱活动,完成了中国人首次的太空行走,向世界人们展示了太空中的五星红旗,不过神舟七号的出舱活动并没有进行舱外的各项工作,可以说此次天和号出舱活动是一项重大的突破。
细心地朋友也注意到了此次出舱活动的主要工作是为空间站上的机械臂安装脚限位器和舱外工作台,我们知道空间站升空之后可以说只是一个开始,后续还有包括组装、舱外检查、维护等工作需要去做,如果这些工作都交给宇航员的话,先不说失重环境下的工作效率如何,长时间暴露在太空中会存在许多的安全隐患,因此,空间站的机械臂的存在就显得非常有必要了。
中国空间站机械臂的最大的一个特点就是可以在舱外进行爬行,以达到覆盖整个空间站的工作要求,到这里有些人就会产生疑惑了,中国空间站的机械臂与国际空间站的加拿大臂2哪个更加先进呢?先说结果——加拿大臂2更加先进,但是中国机械臂更实用。

中国空间站机械臂与加拿大臂2的差距在哪
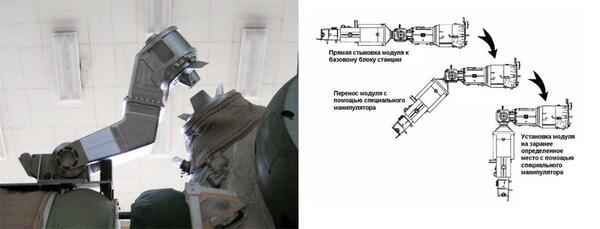
中国空间站机械臂系统简称CSSRMS,主机械臂(CMM)正常状态停泊在天和核心舱的小柱段底部,机械臂的展开长度达到了10.2米,分为两段臂杆和7个活动的关节,原计划后续还会有一个基于实验舱研发的约5米的副机械臂(EMM),既可以满足“左右开弓”进行舱外工作,也可以组合成 一个更长的机械臂。
机械臂的两端安装有末端执行机构,顶部的4个凸起是用来传送交互数据、视频信号和电力的,同样在天和核心舱的舱外安装有许多适配器,适配器的作用就好比攀岩比赛中“抓点”,机械臂在移动的时候会首先寻找舱体上的适配器,然后末端执行器就会捕捉到适配器以达到固定的目的,固定好以后机械臂的另一端就会寻找下一个适配器,首位翻转就做到了在舱外爬行。

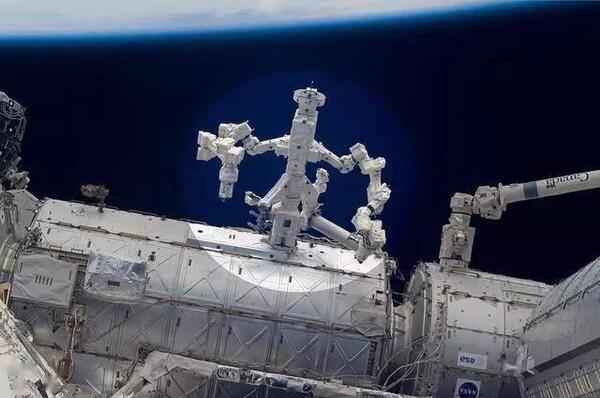
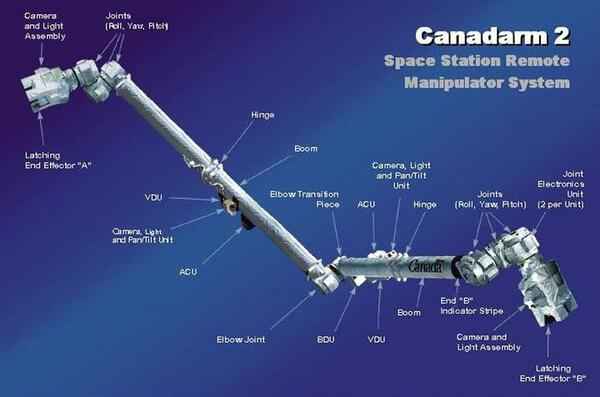
很多人觉得这项技术是中国航天人脑洞大开首创的,不过实际上在国际空间站上的加拿大臂2就已经应用这一技术,不过对于加拿大臂2来说,它的运行工况要复杂的多。
首先,国际空间站自1998年正式建站以来,经过十多年的建设才完成全面投入使用,而加拿大臂2作为后来设计的,国际空间站 舱外的适配器并没有做到 全覆盖,因此平时加拿大臂2一般固定在一个轨道车上,轨道车可以在一段长度在108米的轨道上载着加拿大臂2滑行。
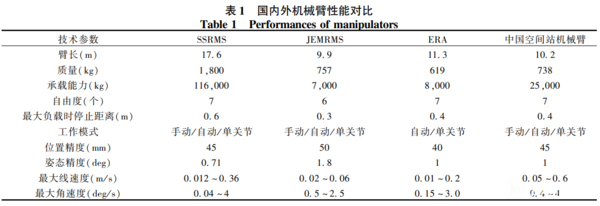
其次,加拿大臂2的重量非常夸张,达到了1.8吨,相应地它最大可以移动116吨的物体,如此巨大的重量和抓取力对于适配器的强度有着非常高的要求,也就不难理解为什么有适配器的情况下还要选择固定在轨道车上了。反观中国的机械臂,只有738千克,可以移动25吨的物体,综合起来对适配器强度要求要低得多,不过鉴于中国空间站和国际空间站的大小差距,客观地说中国机械臂更加符合实际需要,没必要设计如此巨大的抓取力。
当然,移动能力都是为了满足工作需要而设计的,国际空间站上还有两个不可移动的机械臂,中国机械臂与加拿大臂2差距最大的还是在机械手上,加拿大臂2配备了一个仿生手,可以做到不需要适配器抓取不规则物体,相信很多朋友都见过中国空间站机械臂剪太阳板的动图,目前还达不到这个要求,不过未来如果需要的话,配一个“剪刀”也不是不可以。
机械臂最看重的并不在移动能力上
作为外行人,我们对于机械臂的关注点主要还在于在舱外爬来爬去的新奇点,不过对于机械臂来说,最重要的还是自由度上。
中国空间站机械臂和加拿大臂2都是7个自由度,包括肩部3个关节、肘部1个关节和腕部3个关节,这样的设计完全仿生了人类的手臂,人类手臂从肩部到腕部就有7个自由度,比起第一代加拿大臂的6个自由度,多出来的一个自由度差别可谓是非常大。
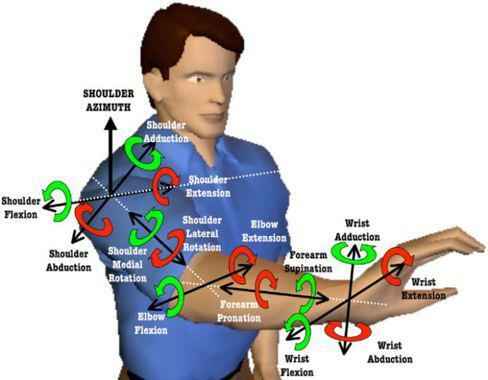
就拿生活中的例子来说,如果我们在拧钥匙的时候少了一个自由度,开钥匙的姿势就会变得非常的难受,不是蹲下对准锁孔,就是身体带动手腕旋转,无奈中做个一个全身运动,我们在看工厂内的机械臂在工作的时候往往要大幅度的上下移动,其中原因并不是摆弄对机械臂控制力有多强,而是单纯的自由度不够,所以只能通过大幅度的调整姿势和角度来满足工作需要。
可以说中国空间站机械臂自设计之初就对标了世界最先进的设计,7个自由度更加灵活方便,也可以做出更多的动作。
当然机械臂的发展并不是一开始就往6个自由度上设计的,最初苏联在和平号上就设计了一款可以称为机械臂鼻祖的自动对接系统(ASPR),当时的空间站新对接的舱采用轴向对接,成功对接后就需要自动对接系统将舱的角度旋转90°,方便下一个对接舱对接。那时的机械臂非常的短小,自动度也很低,但是好用就行了,这一原则也延续了下来,评价一套空间站的配套工具,好用永远是王道。
结语
中国空间站机械臂和加拿大臂2客观地说还是有些差距,不过对于中国航天技术来说已经是一个巨大的跳跃了,没有哪个国家的空间站起步就要对标世界顶尖技术的,而且中国机械臂在操控上延续了“好用”这一原则,不仅可以做到在空间站和地面控制中心进行操作,而且还能按照程序自动完成一些工作,这让不断升级依然无法做到自动化的加拿大臂2非常羡慕。